競技結果
優勝 :arches(一般社団法人BlueArch)
準優勝:RETURN ZERO(愛知工業大学)
AIチャレンジ部門概要
AI チャレンジ部門は水中ロボットへの AI の導入を後押しするために設立されました。 ワークショップでの発表(プレゼン点)、水中ロボットの自律化の度合い(実装点)、水槽競技(競技点)の合計で競います。 水槽競技内容は「風船割り」です。
2019年度に開催した時の映像と資料はこちら. プール内での風船動画集 詳細なルールについては、トップページにあるガイドブックをご確認ください。
参加チーム審査を通過した機体のみ。掲載は登録順です。 実際の競技順は当日、くじ引きで決定します。
| arches(アーチーズ) |  |
| BlueAUV | |
| 457 × 338 × 254 mm 11 kg | |
| 「BlueAUV」は、市販のBlueROV2を基に独自カスタマイズを施した自律型水中ビークルです。堅牢な外装はそのままに、制御システムを完全に再構築しました。RaspberryPiを中心に、独自開発した拡張ボードにIMUセンサや圧力センサ、ESCを接続し、自律制御を実現しています。認識システムにはEdgeTPUを搭載することで、高速な画像認識を可能にしました。制御システムはすべてROSで統一し、各システムをコンポーネントごとにわけることで、メンテナンス性を向上させています。 |
| RETURN ZERO | 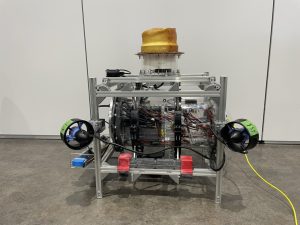 |
| WLUFFIN | |
| 593 × 643 × 604 mm 26.4 kg | |
| スクリュー推進方式を採用したホバリング型機体である。4つのスクリューと可変バラスト機構を搭載し水平方向移動と上下移動の4自由度の動作を行う。可変バラストによる上下方向の移動を採用することで、スクリューによる上下移動と比較して低消費電力と高い安定性を実現している。可変バラスト機構について、システム同定を行い、パラメータを導出し制御することで任意の深度でホバリング行う。スクリューの回転速度とバラストの調整を組み合わせることで、精密な位置制御が可能であり、安定した動作を実現する。この機体は、水中環境における精密な作業にも対応できる設計となっている。また、機体搭載センサーは深度カメラ、深度センサー、IMU、ソナー等がある。 |
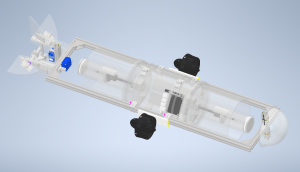
| Team Celeste |
|
| Torpfin | |
| 1200 × 450 × 340 mm 10 kg | |
| Torpfinは、スクリューを推進機構に採用した円筒形状の水中ロボットである。 本機体は、可動式のフィンを採用した魚雷形状となっている。 そうすることによりロボットの直進性が向上されている。 先端部分を水中抵抗の少ない形状にすることによって、水中移動時の抵抗を軽減し、先端部分にカメラを搭載している。 カメラ映像から画像認識を用いて風船の識別を行う。 通常は推進力を変更する際には別のスクリューなどを用意する必要があるが、可動式のフィンを推力の偏向機構として採用することで、スクリューの個数を削減し、低消費電力かつ低コストでの4自由度の動きを実現している。 また、浮力調整機構として、ピストンと滑りねじを利用した水を押し出す方式を採用している。 |
| MakiCommanders |
|
| MakiComet | |
| 500 ×410 ×350 mm 8.3 kg | |
| ロボットは昨年の競技に参加したSebastianをベースにしています。2つのヒーブスラスターと2つのサージスラスターにより、4自由度(サージ、ヒーブ、ピッチ、ヨー)の制御が可能です。またセンサーとして、深度推定用の深度センサーと水中の風船を認識するためのカメラモジュールを取り付けています。昨年はカメラ画像にOpenCV Hough変換を用いることで物体認識を行っていましたが、今年は楕円あてはめやYOLOによる物体認識など複数の手法を試し、精度向上を目指す予定です。 制御にはRaspberry Pi 5とTeensyドライバーを使用します。Raspberry Pi上でロボット制御用の一般的なオープンソースツールであるRobot Operation System2 (ROS2)を使用し、TeensyドライバーでモータードライバーにPWM信号を送っています。 |

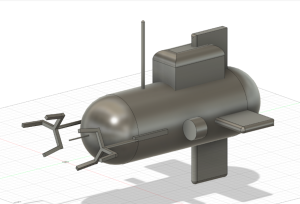
| MITAROBO |
|
| サブマリンMITA | |
| 500 × 400 × 300 mm 10 kg | |
| サブマリンMITAは、水中探査や水中ロボット競技を目的とした水中ロボットです。コンパクトなオリジナル設計、構造により、狭い空間で自由に動くことを目標に開発をしています。 AUVとして運用するときは自律動作に切り替えてロボットを動かし、ROVとして運用する時は遠隔操作に切り替えられるようにしようと考えています。 ブラシレスモーターを使ったコンパクトなスラスターを使うことで機動性をあげ、マニピュレータを装備することで風船を掴もうと考えています。 オリジナル機体の製作は今年が初めてですが頑張って作成していこうと思います。 AIチャレンジ部門では、完全自律で動作しなければならないのでとても難易度が高いが、まずは基本的な動作ができるように頑張りたいです。 |