競技結果
優勝 :小山高専水中ロボット開発チーム2024(小山工業高等専門学校)
準優勝:チームうすしお(慶應義塾大学)
3位 :UCD水中ラボ(愛知工業大学)
沖電気株式会社特別賞:小山高専水中ロボット開発チーム2024(小山工業高等専門学校)
フリー部門概要
フリー部門は技術内容やオリジナリティを競う部門です。プレゼン点・競技点の合計で勝敗が決まります。
プレゼン点はワークショップでの発表、競技点はフリー演技によって採点されます。
詳細なルールについては、トップページにあるガイドブックをご確認ください。
参加チーム
審査を通過した機体のみ。掲載は登録順です。 実際の競技順は当日、くじ引きで決定します。
| UCD水中ラボ | 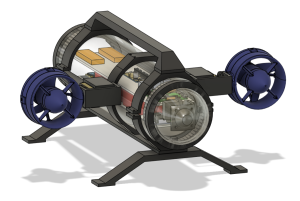 |
| Crux(クラックス) | |
| 500 × 400 × 200 mm 5 kg | |
| メイン:メカ サブ:実用 | |
| Cruxの最大の特徴は、両翼にチルトスラスターが取り付けられている点である。チルトスラスターにより出力方向と大きさを変更することで目標方向や姿勢状態に合わせてロボットの制御が可能である。例えば、潜水・浮上時にはスラスターの出力方向を垂直とし、水平推進時には前方に出力するようにする。これにより、Cruxは、2つのスラスターのみで自由度の高い動作を可能とし、搭載物を最小限に抑えることで高い機動力を実現している。 また、小型軽量なCruxは、持ち運びも容易である。 以上より、Cruxのポイントをまとめると、 ・チルトスラスターを採用 ・高い機動力 ・持ち運びも楽々 となる。 |
| チームうすしお |
|
| 流龍 (リューロン) | |
| 300 × 275 × 165 mm 2 kg | |
| メイン:メカ サブ:実用 | |
| エアモータの機構を流用した流体駆動スラスタで動作する水中ロボットです。 スラスタを含めフレームや浮力材など、ほとんどの部品をそれぞれに適した3Dプリンタで作成しています。また、ロボットが何らかの異常によって回収が不可能になった場合はポンプから供給されていた水圧によって保持されていた調査機器コンテナがフレームから切り離されてコンテナのみを浮上させることができます。 フレーム部分は海洋生分解性がある酢酸セルロースで作成されているため海中で分解されて環境への負荷を最低限に抑えることができます。 |
| 小山高専水中ロボット開発チーム2024 | 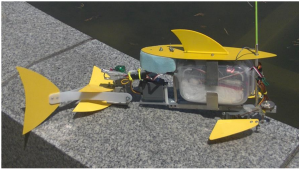 |
| Dr. イエローフィッシュ | |
| 370 × 200 × 175 mm 0.561 kg | |
| メイン:バイオミメティック サブ:メカ | |
| 本水中ロボットは、有害化学物質やマイクロプラスチック等による水中環境の汚染を守るため、その環境調査等を目的とした魚の尾ヒレ推進を模倣した水中ロボットです。魚ロボットの利点は尾ヒレの揺動運動による推進力を得るため、小魚や水草の水棲生物を傷つけず環境調査を行うことできます。現在、開発中の魚ロボットは特に人が潜れないような水中の狭所空間を自由に動き回り、水棲生物の生態を観察に適するようなものを目標としています。 小山高専水中ロボット開発チームでは、クランクアームの回転と対向弾性板を組合わせた独自の尾ヒレ揺動運動機構を開発しています。2020年、この機構を搭載した初号機「クランカーフィッシュ Ver. 1.0」は、水面上を推進する舟のようなロボットでしたが、現在は、水中での運動性能が大幅に改善し、さらに無線通信の利用により操作性が飛躍的に向上しています。 |
| NiAS水中開拓チーム | 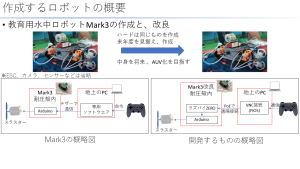 |
| N bot | |
| 400 × 300 × 150 mm 2 kg | |
| メイン:実用 サブ:メカ | |
| 教育用水中ロボットMark3をもとにした、AUV化が可能な入門用の水中ロボットを作成する。マイコンはラズベリーパイZEROとArduinoを使用する。通信にはPOEケーブルを使用し、リアルタイムでの精密な操作が可能。地上のPCへコントローラーで信号を入力し、PIOSを使用して制御をおこなう。誰でも扱うことができるように、シンプルな構造にすることで、メンテナンス性が高まり、誤動作も減る。また、必要なパーツが少なくなるため低コストで作成できるようになる。 |
| 東京海洋大学ロボット研究会 チームA | 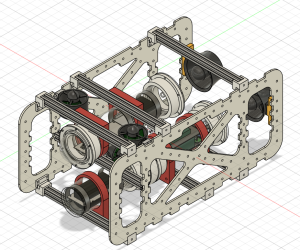 |
| C-ROV Ⅱ | |
| 680 × 350 × 350 mm 3 kg | |
| メイン:実用 サブ:メカ | |
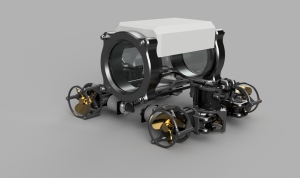
| 昨年度開発したC-ROVの構成を見直し、推進機、電装系、通信系を改良したROVです。機体はパワーハルと制御ハルの2つの耐圧殻と5つのスラスターで構成され、テザーケーブルで操縦用PCに接続されます。 制御ハルにはRaspberry Pi 3とカメラが搭載され、テザーケーブルを通じてPCとイーサネットで通信し、映像伝送と機体制御を行います。 パワーハルは中間部の隔壁によりバッテリー部とモータードライブ部の2つに分かれており、隔壁には電源供給ケーブルがポッティングされています。モータードライブ部にはスラスターの駆動に必要なArduinoとESCが搭載され、制御ハルとパワーハル間をUART通信でやり取りすることで、Raspberry Pi 3で処理したデータを基にArduinoでスラスターの出力制御を行います。 スラスターにはブラシレスモーターを使用しており、サージ方向とピッチ方向にそれぞれ2つ、スウェイ方向に1つ搭載されています。これにより、前進後退、方向転換、浮上・潜水動作が可能です。 |
| 東京海洋大学 近藤研究室 |  |
| Kuroshio Ⅱ | |
| 850 × 400 × 400 mm 18 kg | |
| メイン:実用 サブ:メカ | |
| プログラムの学習やハードウェアのテスト用のロボットとして学生が気軽に触れられることをテーマに設計をしています。クルージング 型とホバリング型のどちらにでも変化させること ができる AUV で、ともにピッチを制御ができるスラスタ配置としました。フレームにカメラデバイスを複数取り付けられることができます。中で動くコンピュータはArduino、TK1、T-Kernelと複数ありそれぞれが通信をしながらロボットを制御していきます。 |