競技結果
優勝 :DENKO(慶應義塾湘南藤沢高等部)
準優勝:AIT水中ロボットチャレンジ(愛知工業大学大学院)
イワキテック株式会社特別賞:Easys(筑波大学大学院)
ビデオ部門概要
遠方に居住するなど、現地参加が困難なチームのための部門です。
ロボットの技術内容やオリジナリティ、演技等をまとめたビデオ(動画)により競う部門です。必ずしも水中で演技を行う必要はありませんが、演技内容は審査において考慮されます。
参加チームは表彰式に参加してください。オンライン(Zoom ウェビナー)での参加も可能です。
詳細なルールについては、トップページにあるガイドブックをご確認ください。
見学を含む参加者の方へ:
良いと思った動画に「高評価👍」を押していただくと、一般投票になります。
(複数の動画に押してもOK。審査の参考にさせていただきます。)
高評価の集計は、競技会の期間内に行います。
全ての動画を見たい場合は、こちらの再生リストから、Youtubeで再生します。
https://www.youtube.com/playlist?list=PL7niPiAIqUjrdj8twEdQ6ga5YqlDMZz3_
ひとつずつ見たい場合は、下記の「動画」リンクからYoutubeで見ることができます。
参加チーム
掲載は登録順です。
| AIT水中ロボットチャレンジ | 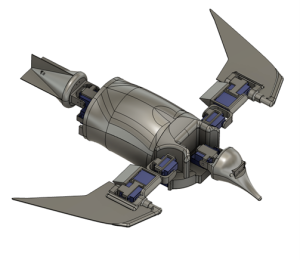 |
| Uria(ウリア) | |
| 664 × 796 × 184 mm 5.9 kg | |
| ウミガラスの骨格を参考に設計した生態模倣水中ロボット。ロボット左右にはウミガラスの遊泳動作を再現するために肩に該当するyaw軸、roll軸、pitch軸の3自由度を与えた関節と手首に該当するpitch軸の1自由度を与えた関節を搭載した。また方向転換に用いる尾と首の関節にはyaw軸とpitch軸の2自由度を与えた。ロボットに搭載したJetson nanoにより動作を制御する。有線ケーブルで操縦者側のPCと接続し遠隔で操作する。また、センサは耐圧容器内に地磁気センサとIMU、水圧センサ、前面と底面にカメラ、同様に底面にソナーを搭載した。これによりロボットの姿勢、深度、周囲環境の情報を取得できる。 |
| OMZw | 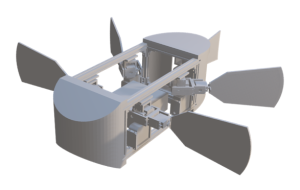 |
| Madera(マデラ) | |
| 908 × 948 × 230 mm 12 kg | |
| Maderaは、水中での生態系調査や環境調査を目的とした鰭推進機構を有する水中探査ロボットで、推進源となる胸鰭が4つと推進補助の尾鰭が1つあり、Maderaの中心部にコントロールボックスが搭載されています。 主な推進原理は、ローイング(前後)運動とフェザリング(捻り)運動を用いた抗力型の推進で、3つのサーボモータを組み合わせた3軸推進機構を備えた胸鰭を使用しています。旋回動作は、左右の鰭で逆向きに水を掻くことで、一方の鰭が前向きの推進力を発生させ、もう一方の鰭が後ろ向きの推進力を発生させることで実現します。また、4つの胸鰭を用いて上昇・下降を行います。 |
| Easys | 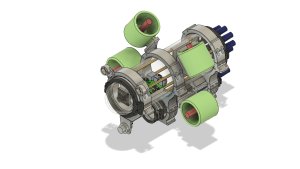 |
| Easys A1 | |
| 420 × 350 × 250 mm 4.0 kg | |
| Easys A1はオープンソース化を目的として製作されたテザーAUVです。誰でも簡単に製作と改良ができるように設計されています。 機体は大きく分けて2つの水密容器で構成されています。上部の水密容器はカメラ、IMU、ESC、マイコンなどの電装を格納しており、下部の水密容器は交換可能なバッテリーと安全回路を格納しています。2つの水密容器は3Dプリンタで製造可能な外殻部品で結合されており、さらにこの外殻部品で4基のスラスターとオプションパーツの装着を可能にしています。 ソフトウェアはROS2で構成されており、センサ情報を頼りにした位置・姿勢の安定化制御、画像認識などを実装しています。大きな処理は水上のPCで、スラスターの制御などは機体内のマイコンで実行し、テザーケーブルを介してROS2の通信プロトコルで互いに通信します。処理が軽い場合には、テザーを取り外し機体内のマイコンのみで自律移動することも可能な設計です。 |
| くるりん |  |
| スピノサウルス | |
| 800 × 200 × 350 mm 1 kg | |
| 本機体は「海遊し魚を採っていたのではないか」「泳ぎながらではなく頭のみを水中に入れ採っていた。」等、古生物学会でも議論が活発ながらも、映画等を通し一般にも広く知られた恐竜「スピノサウルス」型ロボです。 基本機体は、古生物的な謎を水中ロボットの技術で解明する活動の為にAFK研究所で作られた教育用機体です。化石の基本構造を元に作成されています。更に、最近発見された化石や資料を参考に数種のヒレ、身体などを作り、さらに内臓や骨から推定したバランスの改良を行い、泳ぐ、潜る、水中で魚を追いかける等が果たして可能だったかどうか、可能にするには何が必要なのかを確かめる事をめざし作成された最新機体です。 今回、スピノサウルスがいかにして水中を泳いでいたかを調べるために、研究所から機体を貸していただき、帆、手足の長さ、重量のバランスなどについて、比較するためのパーツを作成して検証するための変更を加える予定となります。 |
| DENKO | 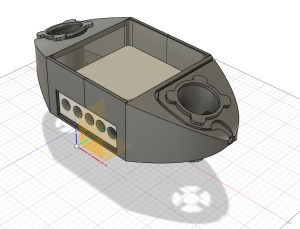 |
| しらす | |
| 412 × 187 × 104 mm 5 kg | |
| 今回挑戦したいのは、自律型で水中の風船を割るロボットです。赤い風船を認識して、そちらに自力で向かって風船を割ります。学校内のプールに赤い風船を沈めて、それを割れるように努力していきます。 昨年度にAIチャレンジ部門に出場した機体を参考にし、改良しました。制御方法として前回はArduinoとRasberryPieを併用したのですが、今回はRasberryPieのみにしてPythonのみで制御をしています。また、モータードライバの変更や、そもそもの基盤の変更などをしています。自作の基盤でRasberryPieとモータードライバの中継を担っています。 外側は3Dプリンタで制作し、形は流線形を意識しました。左右に4つのDCモーターを付け、上昇下降には2つのモーターで制御しています。RasberryPie用のバッテリーにはモバイル充電器を、各DCモーター用には9.6Vのバッテリーを用いています。 |
| ワカヤマソウリュウチーム |  |
| ワカヤマソウリュウロボット | |
| 10,000 × 3,000 × 2,000 mm 3.5 kg | |
| 今回製作したロボットは近年発見されたワカヤマソウリュウの化石をもとに専門家の方からも意見をもらいながら製作しました。製作したロボットはAFK研究所の魚竜用の基本メカに前と後ろの脚部分を実際の化石を復元した体に当てはめた写真をもとに骨の部分と外の皮の部分に分けて作り、化石が出てこなかった背ひれと尾ひれの部分は画家のTakumi様 製作の復元画像をもとにポリプロピレンの板に形を下書きして切り製作しました。実験ではワカヤマソウリュウが生きていた時代にどのように泳いでいたのかを調べるため前の脚だけを動かしてみたり腰の部分から尾ひれにかけて全体的に動かしてどのように進むのかを見ました。 |
| 東京海洋大学ロボット研究会チーム1 | 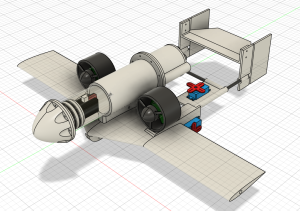 |
| 水星 | |
| 555 × 600 × 150 mm 2.3 kg | |
| 本機体は沿岸部浅深度域の効率的な調査を目的としており、水面下1~数mを航空機のように巡航する。これにより、船舶では入れないような浅瀬やリーフでの稼働が可能であり、広範囲の探査が行える。 機体はロストを防ぐため定常状態で浮上するようになっており、推進時には翼を用いて下向きの揚力を生む事で潜航する。本機はサーボモーター4基とスラスタ2基を装備している。主翼はサーボモーターを用いて左右外翼部を独立して回転させる事が可能である。旋回時に機体をロールさせる他、左右を同方向に回転させる事により、上下方向の揚力が制御可能である。 尾翼はH型を採用しており、ラダー、エレベーターをそれぞれサーボモーターで駆動する。ラダーは左右でリンクしており、スラスタの後流に入る位置にあり、旋回性を高めている。 翼下には追加装備搭載スペースを有し、使用者が任意の装備(水温計、プランクトンネット等)を搭載する事が可能である。 |